Product Center
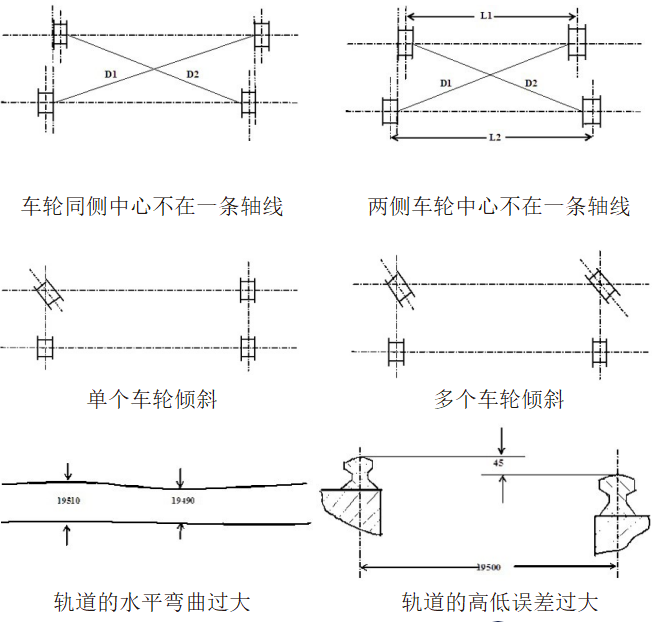
啃轨的表象
啃轨的原因
起重机运行时啃轨,有的是车轮问题,有的是轨道问题,还有的是桥架问题和电气问题,啃轨的原因多种多样。
轨道
(1)轨道安装质量不合格,轨道水平弯曲过大(要求侧面直线度误差不大于2mm),超过跨度公差时,就会产生啃轨,这种啃轨会出现在固定区域。
(2)轨道轨距过大时,外侧轮缘啃轨;轨距过小时,内侧轮缘啃轨。
(3)两根轨道同一截面上的轨面高度差过大(柱子处不大于10mm,其它处不大于 15mm),造成大车侧移,超高侧外侧啃轨,另一侧内侧啃轨。
(4)轨距一端大、一端小,两根轨道平行度超差。在这样的轨道上运行时,轮缘与轨道间隙愈走愈小,直至内侧轮缘啃轨。
(5)轨道安装垫板未压实,不承载时轨道保持水平,承载时轨道下陷,造成啃轨。
桥架变形
起重机的桥架及基础变形,必将引起车轮的歪斜和跨度大小的变化,从而导致大车运行啃轨。因桥架变形,促成端梁产生水平弯曲,造成车轮水平偏斜超差,这也是啃轨的主要原因。桥架的变形必然引起车轮的歪斜和跨度的变化。
其它原因
(1)分别驱动的大车运行机构中2台电动机转速不一致,导致左右车轮线速度的差异,造成车体跑偏啃轨。
(2)两端联轴器传动间隙差过大,引起车轮不能同时驱动,造成啃轨。
(3)分别驱动的大车运行机构2台制动器,调整间隙不同,造成制动力矩不等,步调不一致。
(4)轨道顶面有油污、冰霜、杂物等,引起两侧车轮的行进速度不一样时,必然引起车轮轮缘与轨道侧面摩擦,即引起运行啃轨。
总之,造成“啃轨”的原因较多,有的是单一因素影响,有的是几个因素同时作用综合造成。
啃轨的影响
(1)啃轨对钢结构的影响
直接的影响是,轻微的啃轨会造成轮缘及轨道的侧面有明显的磨损痕迹,严重啃轨会造成轮缘和轨道的侧面金属剥落或轮缘向外变形。因此需要频繁更换磨损的车轮,或者更换轨道。
其次起重机的运行啃轨,必然产生水平侧向力,将导致轨道横向位移,引起设备振动,可能导致固定轨道的螺栓松动,还可能会引起整台起重机的振动,这些都不同程度的影响了钢结构的稳固。
(2)啃轨对电气设备系统的影响
起重机在运行中啃轨会产生相当的阻力,增加了电力系统的负荷突变,造成电气元件使用寿命降低。
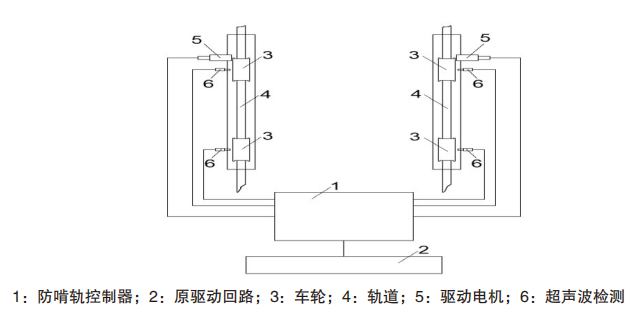
防 啃 轨 智 能 纠 偏 系 统

选型

*普通型:可以完成防啃轨实时调整
*智能型:可以绘制轨道曲线,可以保留轨道间距参数
*可以检测4个点,也可以检测6点或者8点
智能防啃轨控制器的综合技术特性参数

控制器原理